Bypasses the system's normal motion blending features and defines how the execution of two sequential motions are to be overlapped. Can also automatically limit the rounding of corners between sequential Cartesian motions.
Move.ForceOverlap (mode, criterion)
Prerequisites
Parameters
mode
A required arithmetic expression that defines how the overlapping is specified and the criterion is interpreted.
criterion
A required arithmetic expression that defines how much the next motion is to be overlapped with the currently executing motion. The interpretation of this parameter is a function of the mode.
Remarks
In most applications, the system automatically attempts to optimize the execution of sequential motions by blending (overlapping) the deceleration of the previous motion with the acceleration of the next motion. For example, if a motion in the X direction is split into two separate motion instructions and the robot is instructed not to stop between the motions, the system will automatically blend the deceleration of the first segment with the acceleration of the second segment such that the two motions will appear as though they were a single continuous motion. This blending can significantly improve the performance of a robot since the time required for accelerating and decelerating adversely affects cycle time.
When the system automatically computes the amount by which sequential motions are blended, it takes into account the maximum allowable acceleration and deceleration of the robot. This permits the cycle time to be optimized without exceeding the capabilities of the mechanical system.
However, in some cases, it is desirable to override the system's standard blending computations by using the ForceOverlap method to define how much two motions are to be overlapped. This method supports the following different mode's of operations.
mode = 0: Explicit Overlap Specification
This mode explicitly defines the amount that two sequential motions are to be overlapped, specified as the percentage of time of the second motion. This method has the following benefits as compared to automatic blending:
This method has the following disadvantages as compared to automatic blending:
The interpretation of the criterion parameter is described below.
| mode | criterion | Resulting Overlap |
|---|---|---|
|
0 |
% (0-100) |
% of the total execution time of the next motion that is to be overlapped with the currently executing motion. A value of 0 indicates that the two motions are not overlapped. A value of 100 indicates that all of the next motion is to be overlapped with the currently executing motion if possible. |
The motion overlap generated by this method is subject to the following limitations.
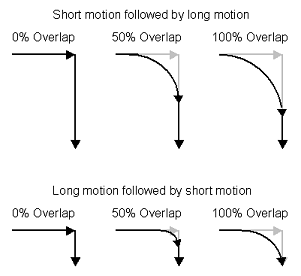
The following simplified drawings graphically illustrate how the overlapping is performed. Inthe figure below, the current motion is shorter than the next motion. In the second set of drawings, the current motion is longer than the next motion.
Note that when the next motion is longer than the current motion, the overlap can be extended to almost the start of the current motion. If the next motion is shorter than the current motion, the next motion will always be started sufficiently after the start of the current motion to ensure that the next motion does not terminate before the current motion.
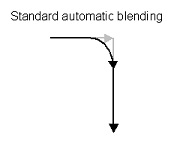
By comparison, the figure below illustrates the amount of overlapping that can be expected as a result of the system's automatic blending algorithm. The automatic blending is very easy to use and ensures that the robot's dynamic capabilities are not exceeded. However, the overlapping is generally limited to the deceleration segment of the previous motion and the acceleration segment of the next motion.
mode = 1: Automatically Limit Rounding of Corners
This mode estimates the distance between the corner of two sequential Cartesian motions (either straight-line or circular) and the closest point on the blended path. If this distance is estimated to exceed a specified limit, the standard motion blending is over-ridden and the overlap is set to approximately achieve the specified corner distance.
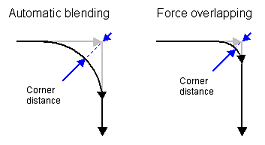
This is illustrated in the figure below. The "Automatic blending" picture shows the path computed by the system to minimize the motion execution time at the expense of a large deviation from the corner point. The "Force overlapping" picture shows the path that is automatically computed to achieve the specified maximum corner distance.
If the standard automatic blending algorithms produce a path that has a corner distance that is approximately equal to or less than the specified corner distance, the path computed by the standard motion blending algorithms is executed. However, if the corner rounding is too great, the motion overlap is automatically reduced. The reduced overlap will decrease the corner rounding and the corner distance and will therefore result in an increase in the motion execution time.
For this mode, the interpretation of the criterion parameter is described in this table.
| mode | criterion | Resulting Overlap |
|---|---|---|
1 | distance in mm | If required, the overlap between the next Cartesian motion and currently executing Cartesian motion is automatically reduced to approximately achieve a corner distance that does not exceed the specified criterion. |
If the currently executing and the next motions are not Cartesian (e.g. straight-line or circular) motions, this mode is ignored.
This special mode will produce the most accurate corner distances if the two motions have relatively small s-curve ramp times and their accelerations, decelerations and speeds are similar.
Examples
Dim pf1 As New Profile
Robot.Attached = 1 ' Get control of robot #1
pf1.Inrange = -1 ' Don't stop at end of motion
Move.Rel(Location.XYZValue(10), pf1) ' Move 10 mm in X direction
Move.ForceOverlap(0, 50) ' Overlap 50% of the next motion's time
Move.Rel(Location.XYZValue(0,10), pf1) ' Move 10 mm in Y direction
Move.ForceOverlap(1, 1) ' Next corner distance should be <= 1mm
Move.Rel(Location.XYZValue(10), pf1) ' Move 10 mm in X direction
Robot.Attached = 0 ' Release control of robot
See Also