For all robot types, “Safety Zones” can be defined that disable motor power and halt the motion of the robot if its tool center point (TCP) violates the requirements of a user-defined 3D volume.
Types of Safety Zones
These 3D safety zones can be used to:
As currently implemented, the “keep out zones” and “stay within zones” are provided as general safety features, but they do not meet the stringent Category 3 safety standards that require fail-safe redundant logic. However, the “speed restrict zones” do provide the requisite redundancy and are in the process of being Category 3 certified. The “keep out zones” and “stay within zones” are collectively referred to as “uncertified zones” and the “speed restrict zones” are referred to as “certified zones.”
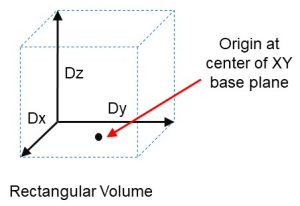
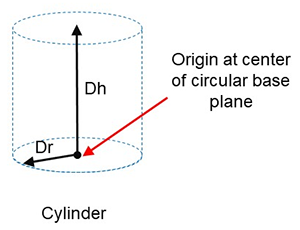
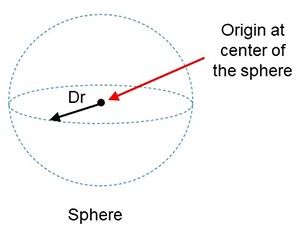
The supported zone shapes are rectangular volumes, cylinders, and spheres. To define a safety zone, the type of safety zone must be specified along with its origin and dimensions.
For increased generality, uncertified zones can be arbitrarily positioned and rotated in all three dimensions. Due to implementation limitations, certified zones must be non-rotated rectangular volumes, which can be arbitrarily positioned. Up to 10 zones can be defined for each robot and any mix of certified and uncertified can be specified. Due to safety requirements, any new or modified zone specifications only go into effect after the controller is rebooted.
Safety Zone Violation Detection and Clearing
Uncertified safety zones are active in the following circumstances:
Certified safety zones are only active during program-controlled motions (of all types) since this is the only circumstance where higher TCP speeds are possible.
When motor power is enabled and the robot’s TCP is in violation of an uncertified safety zone, a program-controlled motion cannot be initiated. This condition can be cleared by disabling motor power and manually repositioning the robot or by manually jogging the TCP in World, Tool, or Joint modes, so long as the jog motion reduces the safety zone violation distance. That is, jogging motions that increase the violation of a safety zone are not permitted.
Please note that safety zone testing is based on the TCP of the robot. Therefore, it is very important that the position of the tool center point relative to the robot’s tool mounting flange is set correctly. Please see the Robot.Tool property for information on defining the TCP.
Certified Speed Restrict Safety Zones
While the uncertified safety zones perform conventional tests on just the position of the TCP, there are two certified safety zones, and these perform special tests to detect if the speed of the TCP exceeds a limit while the TCP is within the zone. The first certified safety zone tests if the Z downward speed of the TCP exceeds a specified limit. This safety zone was implemented for the PreciseFlex™ ™ 300/400/3400 robots since their only intrinsically non-safe motion is a high-speed downward Z motion that could trap a person's hand between the tooltip and a fixed object or horizontal surface. The second certified safety zone tests if the horizontal, XY planar, speed of the TCP exceeds a specified limit. This test was developed for the PreciseFlex™ DD robots since robots can generate excessive speeds when moving horizontally.
For both of these tests, in order to satisfy the computational redundancy requirement of the Category 3 safety regulations, the shapes of these safety zones are limited to non-rotated rectangular volumes.
Please consult the user manuals for these PreciseFlex™ robots for when speed restrict safety zones must be defined to safely operate these mechanisms.
Configuring Safe Zones
Up to 10 safety zones can be defined per robot. Each of these zones is specified by filling in one of the Parameter Database IDs 16900 to 16909, which are labeled "Safety Zone: type, x/y/z/y/p/r, dim 1/2/3". Any combination of certified and uncertified safety zones can be specified. Each of these DataIDs consists of an array of 10 numbers and the first value defines the safety zone “type”. Any DataID that has a zero “type” is ignored. The following describes the possible safety zone types:
| Safety Zone Type | Description |
|---|---|
|
0 |
Undefined safety zone |
|
1 |
Rectangular volume, keep out zone |
|
2 |
Cylinder, keep out zone |
|
3 |
Sphere, keep out zone |
|
4 |
Rectangular volume, stay within zone |
|
5 |
Cylinder, stay within zone |
|
6 |
Sphere, stay within zone |
|
7 |
Non-rotated rectangular volume, Z downward speed restrict zone |
|
8 |
Non-rotated rectangular volume, XY speed restrict zone |
The following briefly describes the safety zone DataIDs. When any of these DataIDs are modified, the controller must be rebooted for the change to be put in effect.
| DataID | Parameter Name | Description |
|---|---|---|
|
16900 to 16909 |
Safety Zone: type, x/y/z/y/p/r, dim 1/2/3 |
Each safety zone definition consists of an array of 10 values. The first value is the safety zone “type”. The next six values define the position of the origin of the volume of interest and its orientation. This is specified as a standard Location value: x, y, z, yaw, pitch, roll. The final three values define the size of the volume of interest. For the permitted shapes, this is interpreted as: Rectangular volume: Dx, Dy, Dz Cylinder: Dh, Dr, 0 Sphere: Dr, 0, 0 For example, for a downward Z non-rotated rectangular volume speed restrict safety zone, a single DataID should be specified as follows: 7, x, y, z, 0, 0, 0, Dx, Dy, Dz Where x, y, z are the coordinates of the center of the base of the rectangular volume and Dx, Dy, Dz are the dimensions of the volume, all in mm. |
In addition, the following DataID must be initialized to establish the maximum speed limits for the certified safety zones:
| DataID | Paramter Name | Description |
|---|---|---|
|
2740 |
Certified safety zone, max Z/XY spd mm/sec |
These parameters define the maximum speeds that are permitted for the Certified Speed Restrict Safety Zones. The first value is the maximum downward Z speed (when within the safety zone) in mm/sec. Since this is a downward speed, it should be a negative value and defaults to -200. The second value is the maximum permitted speed in the horizontal XY plane (when within the safety zone), and defaults to 200 mm/sec. |