The .gpo file is a global modules file that contains motion objects and/or global GPL variables. It is an object file, a type of GPL code file. Double-click the .gpo file to open it.
The editor screen will display Variable Types in the left panel and their Values on the right.
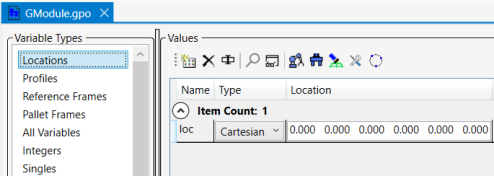
The toolbar at the top of the Values window will display icons that provide functions to interact with the GPL data. Some of the tool icons are dynamic, and they display only as needed depending on the variable type.
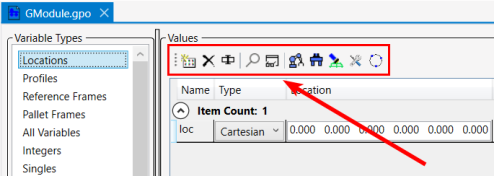
Here are the toolbar icon definitions:
| Icon | Description |
|---|---|
|
|
Add |
|
|
Delete |
|
|
Insert new item into an array |
|
|
Append a new item into an array |
|
|
Delete the selected array item |
|
|
Find the reference to the variable in the Project |
|
|
Add selected item to the watch window |
|
|
Record the current position of the robot into the selected location |
|
|
Teach a vision pick offset and assign to the value of a location |
|
|
Use the vision system to locate an object and assign to the value of a location |
|
|
Apply the current location as a TOOL offset for the robot |
|
|
Run a process to define a tool offset via a tech sequence. |
If you select Pallet Frames, the following icons will display.
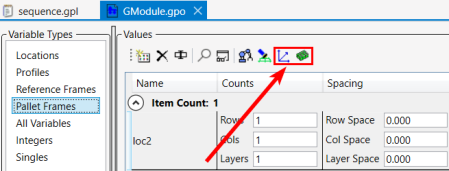
| Icon | Description |
|---|---|

|
Teach a frame using 3 robot points |

|
Teach a pallet using the robot |
