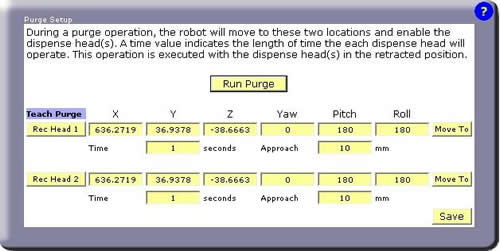
When the Configuration tab is clicked and the Purge Setup button is clicked, the panel pictured below is displayed in the bottom right of the Configuration page. This panel defines where the robot is moved to purge the two dispense heads and the duration of the purge operation.
Figure 43-22: Purge Setup Sub-Panel
The purge operation is a pre-defined process that safely moves the robot to a designated position and dispenses fluids for a specified period of time. This function can be manually invoked from a number of pages and is used to test if a syringe is operating properly and to clear the needle. The purge operation performs the following steps:
For this function, the speed and acceleration of the robot is defined by the Robot Motion parameters. For each syringe head, the following fields and buttons are defined.
| Purge Parameters | Description |
|---|---|
|
Run Purge |
Executes the purge operation as defined above. This is the same function that is available on a number of other panels. |
|
Rec Head # |
Records the current position of the robot (with no tool enabled) for the selected dispenser head. |
|
X, Y, Z, Yaw, Pitch, Roll |
Displays the purge location coordinates and permits them to be edited. |
|
Move To |
Displays a pop-up window that can move the robot to the purge position or to a position above this location. |
|
Time |
Specifies the duration that the syringe is purged in seconds. |
|
Approach |
Defines the "Approach" height above the purge location. |
|
Save |
Saves the purge settings to the flash disk. |