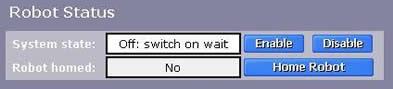
As a convenience, a number of the web pages provide buttons and fields for enabling/disabling power to the robot's motors, displaying the current state of motor power, and for "homing" the robot. For example, the Operator Control Panel has a "Robot Status" section that appears as follows:
Figure 43-10: Robot Status Section of the Interface
The Enable button enables power to the robot's motors and releases any motor brakes. The robot will normally be left in a position control mode and the motors will maintain the current position of the robot until a command to move is generated. The Disable button will immediately turn off power to the motors.
|
|
|
|---|---|
| Electrical Shock Hazard | |
|
Before enabling power, ensure that the following steps have been performed: (1) the robot has been properly mounted; (2) all required safety interlocks have been installed and tested; and (3) power has been connected. For the PrecisePlace robots, this information is provided in the “PrecisePlace 2300/2400 Robot, Hardware Introduction and Reference Manual”. |
|
When power is enabled, the System state transitions from Off: switch on wait, which indicates that the system is waiting for a switch to be changed to enable power, to one of the following:
Several other informational messages are possible such as those that indicate that the robot is in manual control mode or that a hardware E-Stop button is being asserted.
Some systems are also equipped with a blinking power light. In the case of the PrecisePlace robots, a yellow LED is mounted on the top of the Z-axis motor. When the controller is first powered on, this LED will blink at a rate of about once per second. When motor power is enabled, the LED will blink at a rate of 4 times per second.
Before the robot can execute a dispensing Process or move in certain manual control modes, the robot must be "homed" in addition to having its motor power enabled. Homing is the process in which each axis determines its position relative to an absolute 0 reference position. This permits the robot to accurately repeat a taught motion sequence after AC power has been cycled and the controller is restarted. Homing only needs to be performed once after the controller power is restored, no matter how many times the motor power is enabled or disabled.
When motor power is enabled for the first time after the controller is restarted, click the Home Robot button to home the robot. The homing method varies from robot-to-robot and from axis-to-axis. Some axes are equipped with special homing sensors. Others simply rely upon a travel limit signal or hard stop to re-establish the absolute position. In the case of the PrecisePlace robots, the X and Y-axes are equipped with special PreciseFlex Pseudo Absolute Encoders that allow the absolute position to be determined by making a very small 2-4 mm motion. For most robots, the homing process typically takes a minute or so to complete.
At the conclusion of the homing process, the Robot Homed field should indicate Yes and the robot will be ready to be moved under manual or automatic control.