The PreciseFlex Outer Link has been designed to permit tooling to be easily attached and interfaced.
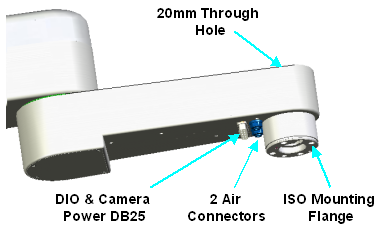
To facilitate electrical interfacing, digital I/O, camera and light power, and Ethernet signals are available on a "ZIO PCB" that is located under the Outer Link cover (this board is described in detail in a later section). The digital I/O signals and camera and light power are brought out in a DB25 connector that is mounted on the bottom of the Outer Link.
For pneumatic tools, two air lines connections (4 mm OD, one-touch type tube insertion, 75 PSI maximum) are also brought out to the end of the robot. These lines are routed internally from the Outer Link through the robot and exit at pneumatic fittings on the Facilities Panel.
To simplify routing the signal and air lines to tooling, the Outer Link includes a 20 mm "Through Hole" that starts at a hole in the top cover and extends to the bottom mounting flange. This hole can also be used for "visual servo-ing" by mounting a camera above the Outer Link that looks down through the hole and visually aligns the tooling or parts held in the end-effector with key landmarks.
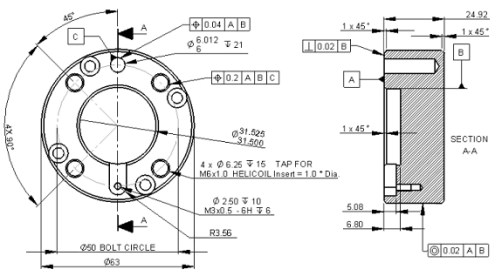
Both the PreciseFlex 1300 and 1400 provide the same ISO standard mounting flange for attaching tooling and end-effectors. Shown below are the details of the tool mounting flange that conforms to ISO 9409-1. All dimensions are in units of millimeters.